Solitude Cube [Intangible Interaction]
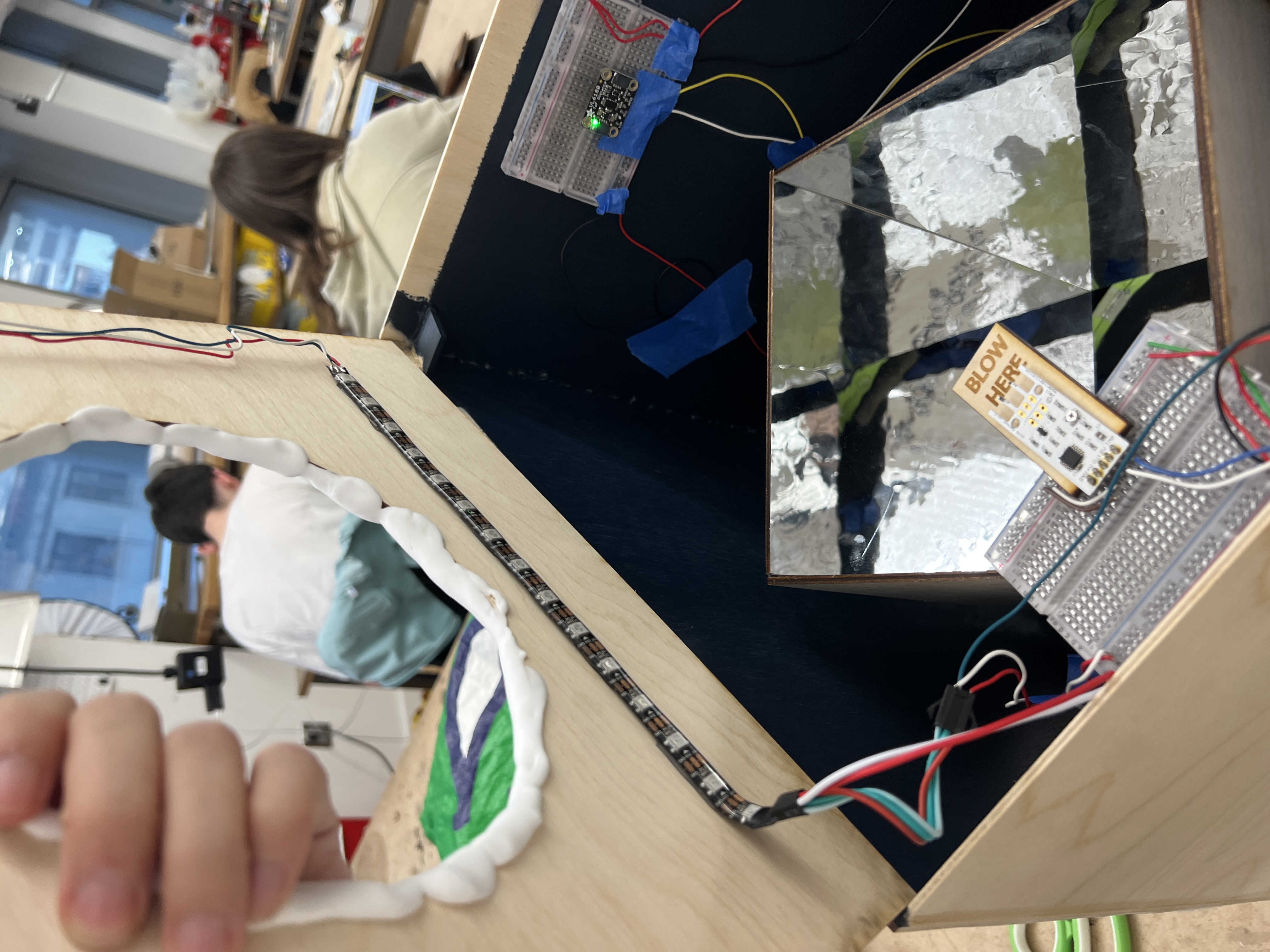
Solitude Cube with sensors, motors and mirrors
Based on a concept by Lang regarding the concepts of solitude, our cube provides interacters with a moment of individual peace and control of a self-contained envrionment of reflection.
Initial sketch idea by Lang 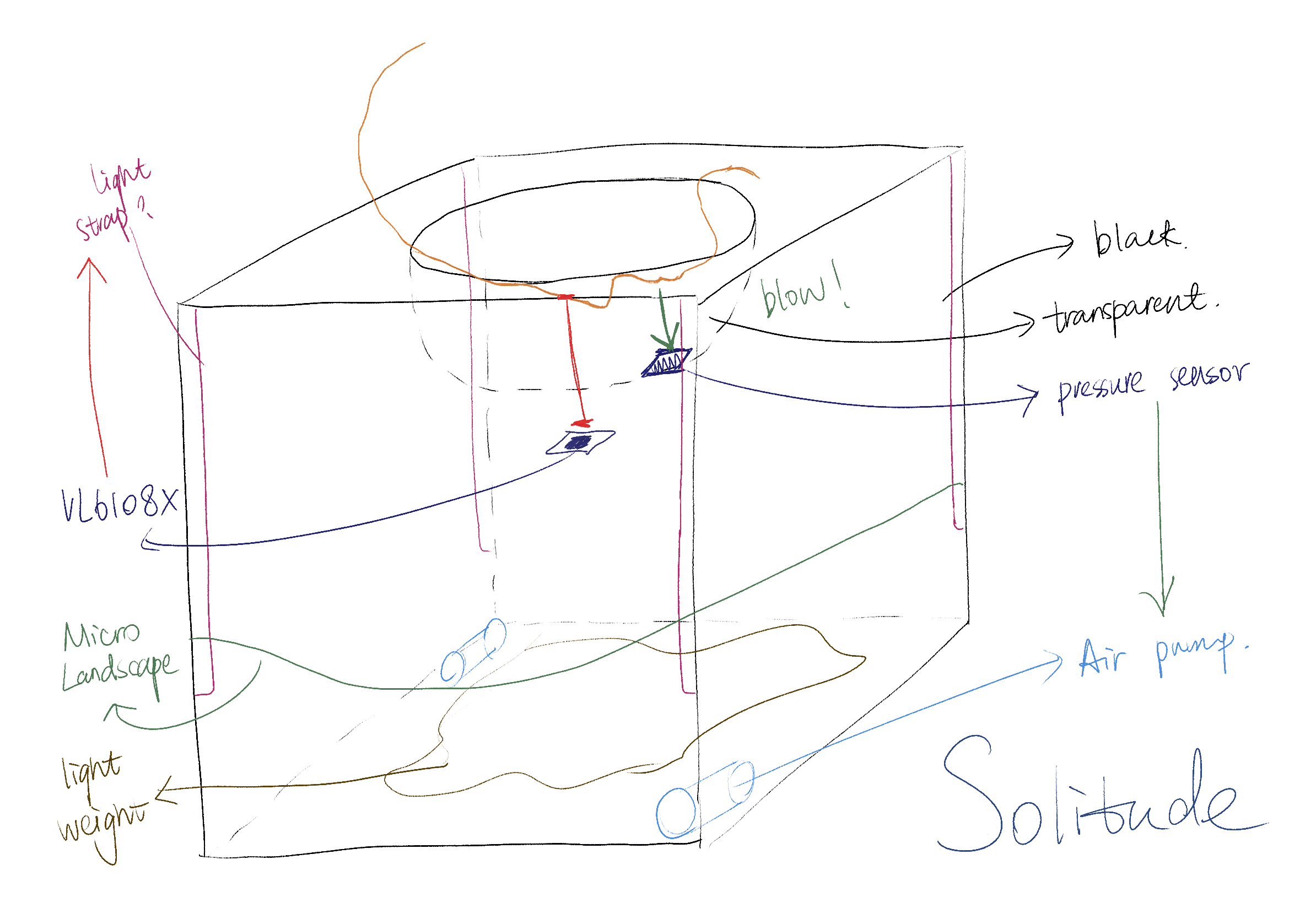
inside cube after spray paitning dark 
 |  |
Arduino Code
#include <FastLED.h>
#include <Wire.h>
#define analogPinForRV A1 // change to pins you the analog pins are using
#define analogPinForTMP A0
#include <Servo.h>
#include "Adafruit_VL6180X.h"
Adafruit_VL6180X vl = Adafruit_VL6180X();
Servo myServo;
byte servoPin = 2;
// to calibrate your sensor, put a glass over it, but the sensor should not be
// touching the desktop surface however.
// adjust the zeroWindAdjustment until your sensor reads about zero with the glass over it.
const float zeroWindAdjustment = .2; // negative numbers yield smaller wind speeds and vice versa.
int TMP_Therm_ADunits; //temp termistor value from wind sensor
float RV_Wind_ADunits; //RV output from wind sensor
float RV_Wind_Volts;
unsigned long lastMillis;
int TempCtimes100;
float zeroWind_ADunits;
float zeroWind_volts;
float WindSpeed_MPH;
//
// Move a white dot along the strip of leds. This program simply shows how to configure the leds,
// and then how to turn a single pixel white and then off, moving down the line of pixels.
//
// How many leds are in the strip?
#define NUM_LEDS 60
// For led chips like WS2812, which have a data line, ground, and power, you just
// need to define DATA_PIN. For led chipsets that are SPI based (four wires - data, clock,
// ground, and power), like the LPD8806 define both DATA_PIN and CLOCK_PIN
// Clock pin only needed for SPI based chipsets when not using hardware SPI
#define DATA_PIN 3
#define CLOCK_PIN 13
#define BRIGHTNESS 20
// This is an array of leds. One item for each led in your strip.
CRGB leds[NUM_LEDS];
// This function sets up the ledsand tells the controller about them
void setup() {
Serial.begin(115200);
// sanity check delay - allows reprogramming if accidently blowing power w/leds
delay(2000);
// wait for serial port to open on native usb devices
while (!Serial) {
delay(1);
}
Serial.println("Adafruit VL6180x test!");
if (!vl.begin()) {
Serial.println("Failed to find sensor");
while (1)
;
}
Serial.println("Sensor found!");
FastLED.addLeds<WS2812B, DATA_PIN, RGB>(leds, NUM_LEDS); // GRB ordering is typical
myServo.attach(servoPin);
Serial.println("start");
// put your setup code here, to run once:
// Uncomment the three lines below to reset the analog pins A2 & A3
// This is code from the Modern Device temp sensor (not required)
pinMode(A2, INPUT); // GND pin
pinMode(A3, INPUT); // VCC pin
digitalWrite(A3, LOW); // turn off pullups
}
void loop() {
//distance sensor:
uint8_t range = vl.readRange();
Serial.print("Range: ");
Serial.println(range);
delay(50);
if (range <= 180) {
// your leds.
for (int whiteLed = 0; whiteLed < NUM_LEDS; whiteLed = whiteLed + 1) {
// Turn our current led on to white, then show the leds
leds[whiteLed] = CRGB::White;
FastLED.setBrightness(BRIGHTNESS);
// Show the leds (only one of which is set to white, from above)
FastLED.show();
}
}
if (range >= 200) {
for (int whiteLed = 0; whiteLed < NUM_LEDS; whiteLed = whiteLed + 1) {
// Turn our current led on to white, then show the leds
leds[whiteLed] = CRGB::Black;
//FastLED.setBrightness(BRIGHTNESS);
// Show the leds (only one of which is set to white, from above)
FastLED.show();
}
}
if (millis() - lastMillis > 200) { // read every 200 ms - printing slows this down further
TMP_Therm_ADunits = analogRead(analogPinForTMP);
RV_Wind_ADunits = analogRead(analogPinForRV);
RV_Wind_Volts = (RV_Wind_ADunits * 0.0048828125);
// these are all derived from regressions from raw data as such they depend on a lot of experimental factors
// such as accuracy of temp sensors, and voltage at the actual wind sensor, (wire losses) which were unaccouted for.
TempCtimes100 = (0.005 * ((float)TMP_Therm_ADunits * (float)TMP_Therm_ADunits)) - (16.862 * (float)TMP_Therm_ADunits) + 9075.4;
zeroWind_ADunits = -0.0006 * ((float)TMP_Therm_ADunits * (float)TMP_Therm_ADunits) + 1.0727 * (float)TMP_Therm_ADunits + 47.172; // 13.0C 553 482.39
zeroWind_volts = (zeroWind_ADunits * 0.0048828125) - zeroWindAdjustment;
// This from a regression from data in the form of
// Vraw = V0 + b * WindSpeed ^ c
// V0 is zero wind at a particular temperature
// The constants b and c were determined by some Excel wrangling with the solver.
WindSpeed_MPH = pow(((RV_Wind_Volts - zeroWind_volts) / .2300), 2.7265);
Serial.print(" WindSpeed MPH ");
Serial.println((float)WindSpeed_MPH);
//map the windSpeed to servoSpeed:
//Servo Speed: 1440-1450:stop, 1450>:clockwise, range:1350-1440
//Wind Speed: 50-170
int servoSpeed=map((float)WindSpeed_MPH,170,50,1350,1440);
myServo.writeMicroseconds(servoSpeed);
Serial.print(" ServoSpeed ");
Serial.println(servoSpeed);
// Serial.print(" TMP volts ");
// Serial.print(TMP_Therm_ADunits * 0.0048828125);
// Serial.print(" RV volts ");
// Serial.print((float)RV_Wind_Volts);
// Serial.print("\t TempC*100 ");
// Serial.print(TempCtimes100 );
// Serial.print(" ZeroWind volts ");
// Serial.print(zeroWind_volts);
lastMillis = millis();
}
}